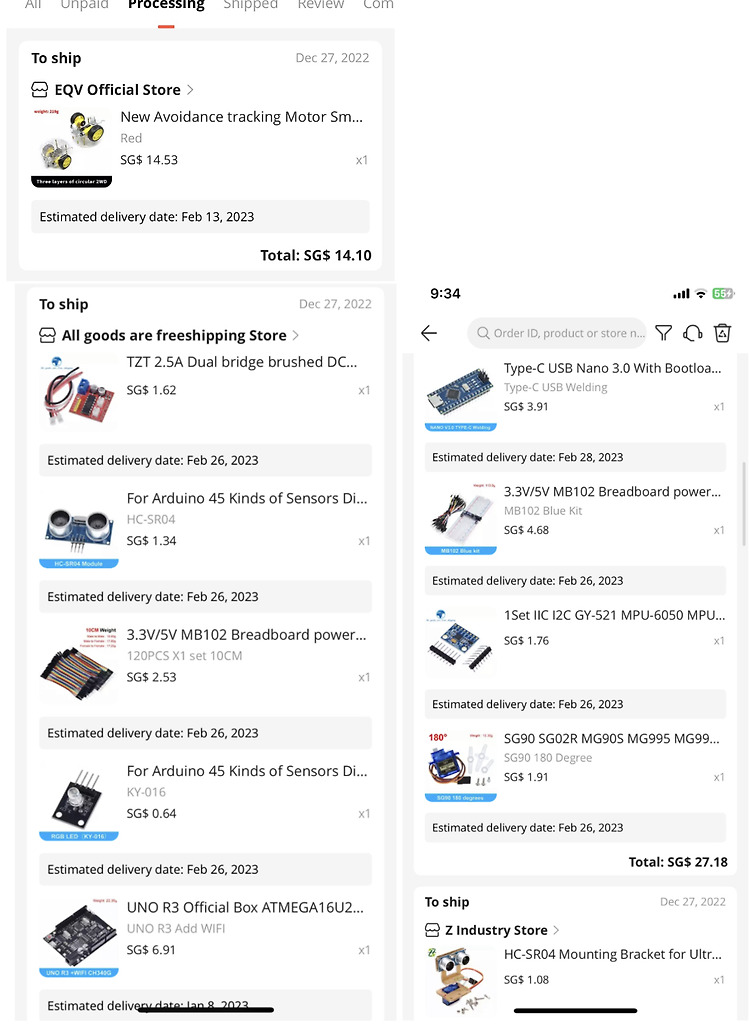
발란스 로봇을 위한 부품들이 와서 하나씩 테스트를 해보는 중이다. 문제해결: 알리에서 구입한 아두이노는 usb 드라이버를 설치해 줘야한다. 드라이버 설치 이후에도 인식이 안되면 usb케이블도 바꿔 보고 아두이노 자체를 바꿔서 확인을 해봐야한다. 인식이 안되는 보드랑 usb도 있을 수 있다. UNO 보드는 코드 업로드 에러 발생하고 나노 보드USB 인식 안되는 현상은 해결이 안되서 새로 나노보드를 하나 구해서 테스트 중이다. 아두이노는 라이브러리 코드가 잘 되어 있어서 손쉽게 접근을 할 수 있었다. 조금만 더 정리해서 조립 및 움직임을 완성해야 겠다. 1. LED 점등 완료 with RTOS lib. 2. 초음파, 자이로, 서브모터 동작 확인 완료 다음 단계: 각 센서들을 동시에 처리하기 위해서 task처..